
HobbyRobotFactory BBS
羽ばたき翼の装置について - tantan
2017/02/06 (Mon) 09:00:35
初めてお便りいたします。先日アングリーバードの可動翼を拝見しまして現在の固定翼のものを可動翼にしたいと思っていますが、電子部品の作成はしたこともありません。ついては可動装置を作っていただいてお譲りしていただけないかオ多寄しました。またお譲りしていただけるとしたら概算金額をお知らせいただけたら幸いです。よろしくお願いいたします。
Re: 羽ばたき翼の装置について - HobbyRobotFactory
2017/02/07 (Tue) 15:27:00
tantanさん、初めまして。
現在、FPV用に5600MHz帯の映像送信機関連に携わっていてなかなか手が空かない状況となっているため、こちらで作成してと言うのはちょっと無理そうです。
Re: 羽ばたき翼の装置について - tantan
2017/02/07 (Tue) 16:42:57
ご連絡ありがとうございます。
可能であれば、ご都合がつくような状況になったときにでもご連絡いただければ幸いです。
OSD書き換え - ikeike
2015/10/01 (Thu) 17:34:54
HobbyRobotFactoryさん
こんにちわ
先日、KV_Termのファームを書き込んでいたMinimOSDをMW OSDファームに変更しようとarduinoIDEでV1.5を書き込みました。
”書き込み完了”という事でGUIで設定しようとしたところ設定dataの書き込みができません。なにが悪かったのか解りもせず再度、arduinoIDEでV1.5を書き込みをしようとしたところコンパイルが終わり、次に書き込みに移行した常態でいくら待っても完了になりません。
OSBが壊れたのでしょうか。何が問題かどう検証したらよいでしょうか。
Re: OSD書き換え - HobbyRobotFactory
2015/10/01 (Thu) 18:58:02
ikeikeさん
私、試してないですが、V1.5ではなくR1.5を書き込んだと言うことでしょうか?
EEPROMのクリアをしてから書き込んでみると言うのは、試してみましたでしょうか?
Re: OSD書き換え - ikeike
2015/10/02 (Fri) 13:30:15
HobbyRobotFactoryさん
間違ってましたV1.5ではなくR1.5です。
EEPROM_Clear.inoの実行も同じ症状でFTDIのRXがずっと点滅していて完了しません。なお arduino-1.0.5-r2を使用しています。
Re: OSD書き換え - HobbyRobotFactory
2015/10/02 (Fri) 13:52:41
なんだろう。
以前あった現象で、MinimOSDにCC3D用のOSDファームを書き込むときだったか、プロポのトレーナー端子をUSBに変換するファームのときだったか忘れましたが、最初はArduino-1.0.6ではうまく行かず、Arduino-1.0.5-r2でもだめで、Arduino-1.0.5でOKだったことがありました。
Ardionoのページからは、現在Arduino-1.0.5-r2より前はダウンロードできない感じ。
ちなみに、EEPROMクリアは1024にしてますよね。
Re: OSD書き換え - ikeike
2015/10/02 (Fri) 16:54:24
HobbyRobotFactoryさん
別のFTDIが在りましたので再度EEPROM_Clear.inoを実行してみると”avrdude; stk500_getsync(): not in sync: resp=0x00"
というメッセージがでました。
>ちなみに、EEPROMクリアは1024にしてますよね。
すみません。PC詳しくないので意味が解らないのですが。
Re: OSD書き換え - HobbyRobotFactory
2015/10/02 (Fri) 17:32:15
 そのエラーは、MinimOSDと通信出来ていないときにでるのですが、MinimOSDがリセット後の起動中などに書き込み操作をした場合にも通信が出来ないので出る場合があります。
そのエラーは、MinimOSDと通信出来ていないときにでるのですが、MinimOSDがリセット後の起動中などに書き込み操作をした場合にも通信が出来ないので出る場合があります。
MinimOSDの電源ONになり少したってから書き込みしてみるといいと思います。
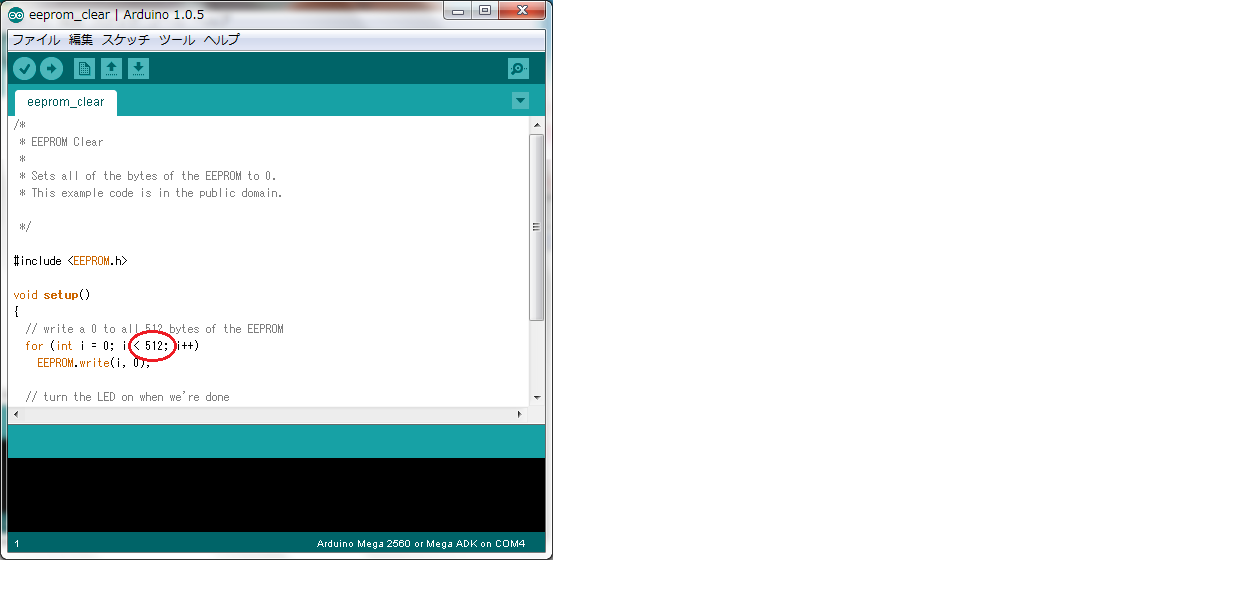
あと、1024の件ですが、MinimOSDに使われているCPUはATmega328Pで、このCPUは1024バイトのEEPROMが内臓されています。
EEPROM_Clear.inoを開くと512になっていて、MinimOSDに書き込んだ場合は、EEPROMの半分までしか初期化できません。
なので、512になっている部分を1024に書き換えてからMinimOSDに書き込みます。
書き込んだ後は、一旦、電源を切ったほうがよいかもです。
で、電源を入れると、EEPROMの初期化が動作し、終了するとLEDが点灯します。これで、EEPROMの初期化が終了です。
Re: OSD書き換え - ikeike
2015/10/03 (Sat) 10:17:10
HobbyRobotFactoryさん
ありがとうございました。
いろいろ試してみましたが”avrdude; stk500_getsync(): not in sync: resp=0x00"
というメッセージがでます。このボードはあきらめます。
お世話になりついでに、もうひとつ教えてください。
他にもKV_Termのファームを書き込んで使っているMinimOSDがあるのですがMW OSDファームに変更する場合にはファームの上書きだけでいいのですか。フォントはそのままで弄らなくていいのですか。
もうひとつ、いまmicroMinimOSD KVMODを注文して到着待ちです。これにはMW OSDファームを入れflip32で使う予定ですが、フォントの書き換えは必要ですか。書き換えはHobbyRobotFactoryさんのHPのMinim OSD設定方法でMax7456_Font_Updateから始めればいいのでしょうか。
Re: OSD書き換え - ikeike
2015/10/03 (Sat) 10:39:08
HobbyRobotFactoryさん
”avrdude; stk500_getsync(): not in sync: resp=0x00"というメッセージ関して
Arduino as FTDI programmer for MinimOSD?
I tried to use my Arduino UNO board as a FTDI programmer as it worked before with some other devices. I managed to
get it write/read settings to the OSD on the MW-OSD GUI software. However I was having trouble flashing firmware on
it using the Arduino, I kept getting this error:
avrdude: stk500_getsync(): not in sync: resp=0x00.
It looks like a data sync issue, but I made sure I connected DTR to the RESET pin on the Arduino, not sure what
more I can do, so I used my dedicated FTDI programmer in the end for firmware uploading, which works perfectly
こんな記事を見つけましたが意味が解りません。
Re: OSD書き換え - HobbyRobotFactory
2015/10/03 (Sat) 13:47:17
ikeikeさん
この書き込み時のエラーは、機器が応答していない場合にでます。
送受信の通信線が接続されていないとかでもでます。
また、CPUのシリアル部分が内部的に壊れている場合や基板が電源投入直後で起動最中などでも出ます。
あと、マイコンボードは何を選択してますでしょうか?
Arduino Nano w/ ATmega328だったと思います。
Re: OSD書き換え - HobbyRobotFactory
2015/10/03 (Sat) 13:52:03
フォントに関しては、使用するファームウェアによるので、それぞれに合ったフォントが用意されているのではと思います。
MW OSDをダウンロードして解凍した中には、フォントのファイルは入っていないので、ArduCAMのフォントかKV_Termのフォントを継承かとは思いますが、MW OSDのページで確認しないと分かりません。
Re: OSD書き換え - ikeike
2015/10/03 (Sat) 15:33:40
お手数かけました。microMinimOSD KVMODが届きましたらいろいろ試してます。
ありがとうございました。
Re: OSD書き換え - 裕
2015/12/15 (Tue) 05:12:27
DTRを繋がないとファームウェアを書き込めないのですが、そこは大丈夫でしょうか?
FCとの接続や、GUIとの接続ではDTRは無視するのでファームを書き換える時にもDTRを忘れてしまう事があります。リード線を直接半田付けした時などに起こりがちです。
Re: OSD書き換え - ken_prettner
2016/01/06 (Wed) 00:11:47
ikeikeさん、こんにちは。
もう解決したかもしれませんが、私もOSDが表示しなくなって、ファームを書き換えようとした時同じメッセージが出ました。壊れたかと思ったのですが、ダメ元で、usbaspで接続し、Arduinoからブートローダーを書き換えたところ、復旧しました。
原因は違うかもしれませんが、ハード的に壊れていなければ試してみる価値はあります。
multiwiiconfigのPIDについて - feaza
2012/10/23 (Tue) 11:23:02
以前multiwii se V2.0を購入させていただいたものです。
こちらのサイトを初め色々なサイトを調べさせて頂き何とか飛ばせる等になってきました。ただ、私が英語力が足りないのでそろそろ限界が出てきましてこちらに質問をさせていただこうと思った次第です。
まず、表題のPID値の意味が判らなく困っております。Pはジャイロ感度、DはD/Rだろうか??てな感じで思っております。RATEはエクスポ的な感じかな?TPAはなんでしょう?
あと、ROOL、PITCH、YAWは判りますが、その下ALT、POS、POSR、NAVR、LEVEL、MAG、MID、EXPO、RATEの意味が判りません。
最後に現在ACC、MAG、BAROを設定して風もないのに左に進み、後ろに進み、ラダー方向も左へゆっくり旋回、上のセンサーを設定した時はスロットルが過敏になりすぎる・・・。色々設定値を変えたりHP回ったりしていますが判りません。どこを設定するとよいのでしょうか?色々聞いて申し訳ありません。すみませんが教えていただけると幸いです。よろしくお願いします。
Re: multiwiiconfigのPIDについて - HobbyRobotFactory URL
2012/10/23 (Tue) 11:51:32
feazaさん、こんにちは。
まずはPIDから。
PIDと表示されているものは、PID制御の設定値を入力する部分です。
PID制御とは、一般的には外乱(マルチコプターの場合は風など)によって位置がずれた場合に正規の位置に戻すための制御を行うために使用します。
例えば、温度制御の場合、部屋の温度を25度に保つとすると、ヒーターをオンにして25度になったらヒーターをオフ、少し時間が経つと24度に下がり、またヒーターをオンするなどです。
ネットで検索すると、難しい数式などで説明したものが多いのですが、雰囲気だけ理解するには下記URLでなんとなく分かるかなと思います。
http://www.rkcinst.co.jp/techno/22/techno_22.htm
実際にマルチコプターの場合、フレームサイズ、モーター出力、プロペラサイズ、フレームの重量で設定する値が変ります。
水平の状態でキャリブレーションし、そのままスロットルを上げると垂直に上昇しますが、この時、ふらふらする場合は、ロール/ピッチの値を変更します。
値を下げると効きが弱くなり、上げると強くなります。上げすぎると、ゆれが大きくなりコントロールできなくなります。
例えば、水平状態から前が下がってしまうと、水平に戻そうと制御します。この制御量を設定すると考えると分かりやすいかと思います。
Re: multiwiiconfigのPIDについて - HobbyRobotFactory URL
2012/10/23 (Tue) 11:56:17
PIDのIとDは、目標値(例えばマルチコプターの場合、水平など)に早く収束するために使用します。
実際には、PIDの値はそれぞれ関連しているので、Pの値が決まってからIを決めると言う感じではなく、Pを下げ、Iを上げてみてどうなるかと言う感じになります。
Re: multiwiiconfigのPIDについて - HobbyRobotFactory URL
2012/10/23 (Tue) 12:09:04
MultiWiiConfですが、画面についてまとまった説明資料がなく、海外のいろんなフォーラムに質問された内容に分かる人が回答しているのが現状のようで、かなり情報が散らばっているようです。
Pos、PosR、NavRはちょっと調べます。
LEVELは、aoさんのhttp://homepage3.nifty.com/aohp/local/hikoukim/MultiWiiReport/MultiWiiSE.htmlの中ほどに書かれている、加速度センサーの効き具合の調整のようです。これも調べてみます。
ALTは高度になります。
その下のMID、RATEは、ミキシングプロポにある設定で、スロットルカーブなどプロポで設定しなくてもここで設定できます。
Re: Re: multiwiiconfigのPIDについて - feaza
2012/10/23 (Tue) 22:37:16
早速のお返事ありがとうございます。
PIDの件は判りやすい説明でしたがマルチコプターにどう反映させればよいか試行錯誤しながらやってみることにします。
あと、色々調べて頂けるとの事で嬉しいかぎりです。どうぞよろしくお願いします。
Re: multiwiiconfigのPIDについて - HobbyRobotFactory URL
2012/10/24 (Wed) 11:48:31
なかなか情報を引き当てられないのですが、MultiWiiConfで略している部分は下記のようです。
英語圏の人は、このような略で意味が分かるのでしょうか?
継続して、調べようと思います。
ALT -> Altitude
Pos -> PosHold
PosR -> PosHoldRate
NavR -> NavigationRate
LEBEL -> Level
MAG -> Mag
TPA -> Throttle PID alttenuation
Re: multiwiiconfigのPIDについて - 紫峰
2012/10/27 (Sat) 19:59:39
feazaさん こんばんわ 紫峰と申します。
私も、同じボードを使用しており、当掲示板を利用しております。
>最後に現在ACC、MAG、BAROを設定して風もないのに左に進み、後ろに進み、ラダー方向も左へゆっくり旋回、上のセンサーを設定した時はスロットルが過敏になりすぎる・・・。
LEVEL,MAG のみで飛行してみて、同様でしたらESCのキャブレーションを試してください。
ボードの個体差かもしれませんが、たぶん私のボードの場合は気圧センサーの数値が一定しませんので、ALTHOLDは設定しないで飛行しますと、かなり安定した飛行になりました。
尚、私の場合は設定にMultiWii GUIを使用して設定しておりますので、ACC、BARD の設定項目はありませんが、たぶんACC=LEVEL , BARO=ALTHOLD かな? 間違ってましたらごめんなさい。
Re: multiwiiconfigのPIDについて - feaza
2012/10/28 (Sun) 11:14:49
HobbyRobotFactoryさん
毎回ありがとうございます。意味が判ると設定時にどういう動きをするのかなとか予想がつきますので助かります。河川敷の誰もいない所で飛ばしておりますので怖がらずに色々設定してみます。
紫峰さん
はじめまして!!返信ありがとうございます。
確かに紫峰さんのおっしゃるとうりBAROを設定してないときは安定している気がします。MultiwiiConfのセンサーの折れ線グラフを見ても上に凄い上下激しく動いてますのでBAROを切ったほうが良いのかもしれません。センサーに窓用の隙間テープ(スポンジ)を貼っているのですが、別の物を貼ったほうがよいのかも??
LEVEL&MAGのみでやってみてESCキャリブレーションも試してみます。ありがとうございます!!
Re: multiwiiconfigのPIDについて - HobbyRobotFactory URL
2012/10/28 (Sun) 11:48:20
feazaさん
画面表示の意味ですが、AUX関係もドイツ語のページを見つけました。後でちょっと整理します。
あと、MultiWiiの次期バージョン開発中に付いているMultiWiiConfでは、AUXの部分が少なくなっているので、実際にリリース版が出るまではどうなるかわからないです。
紫峰さん
コメント、ありがとうございます。
このボードについているBAROは、誤差が大きいのでしょうかね。
Re: multiwiiconfigのPIDについて - 紫峰
2012/10/28 (Sun) 15:27:58
このボードについているBAROは、誤差が大きいのでしょうかね。
個体差だけでなく、どうも誤差が大きいようですね。
feazaさん
私もスポンジ系やらウレタン系等で囲い実験しましたがほとんど変化無し。
私の機体は
F450もどき モーターFSDFc2830 KV:980 プロペラ 8-4.5 (カーボン)ですが、パラメータは最終的には標準の数値が良いみたいです。 プロペラのバランス等機体の振動の出ないよう配慮も必要かと思います。
Re: multiwiiconfigのPIDについて - feaza
2012/10/28 (Sun) 23:25:32
HobbyRobotFactoryさん
ドイツ語のページですか・・・。まったく検索にかかったことありませんでした。見つけれたとしても読めませんが・・・(TT)Multiwiiconfの次期バージョン、正式リリースされてから試してみようと思ってます。
紫峰さん
スポンジ&ウレタンでもダメなんですね・・。どこかのページではEPPで覆われていた記憶がありましたが、空気が通わないとダメかなって思い試しておりませんでしたが、ダメもとで試してみようかと思います。ちなみに私のクアッドの構成はすべてホビキンで調達しましたが
フレーム X550(最近コスモテックで取扱中)
モーター NTM Prop Drive Series 28-26A 1200kv / 250w
ペラ 8×4.5
振動はあまりなくペラバランスも良いみたいです。
Re: multiwiiconfigのPIDについて - HobbyRobotFactory URL
2012/10/28 (Sun) 23:50:45
 feazaさん、こんばんは。
feazaさん、こんばんは。
あれこれと色々やっていて、まとまられていないので、とりあえずURLを載せておきます。
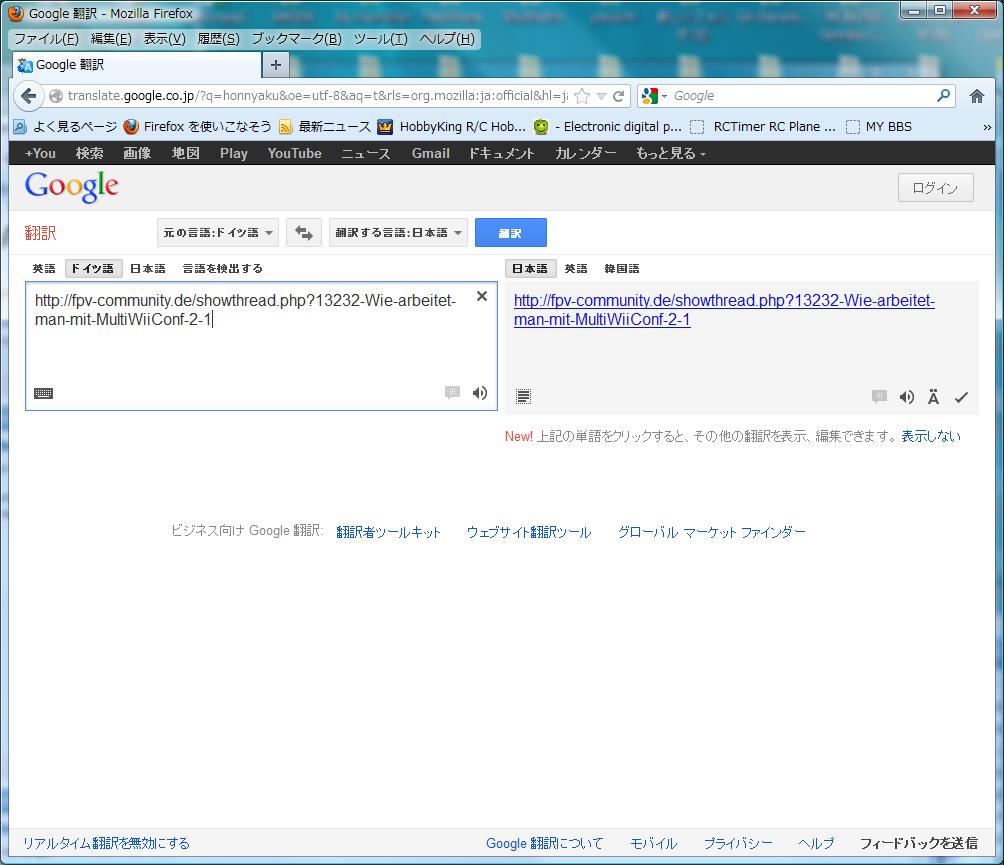
http://fpv-community.de/showthread.php?13232-Wie-arbeitet-man-mit-MultiWiiConf-2-1
添付画像のようにGoogle翻訳の左側の四角の枠の中にURLを貼り付けて、ドイツ語を選択して、右側に表示されたURLをクリックすると翻訳されます。
機械翻訳なので意味不明や変な訳になったりしますが、なんとなくは解るかと思います。
Re: multiwiiconfigのPIDについて - HobbyRobotFactory URL
2012/10/29 (Mon) 00:04:13
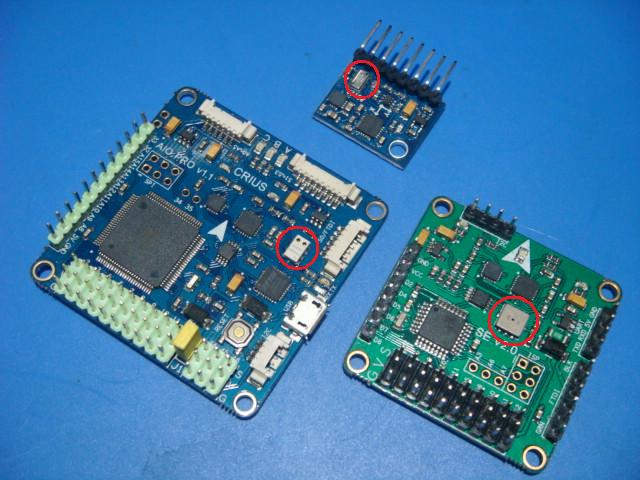 気圧センサーですが、ホビーキングのMultiWii SE V2.0はボッシュ製のBMP085で、CRIUSのAIO ProではMS5611-01BA01が搭載されています。
気圧センサーですが、ホビーキングのMultiWii SE V2.0はボッシュ製のBMP085で、CRIUSのAIO ProではMS5611-01BA01が搭載されています。
添付画像の上の小さな基板には、MS5611-01BA01の後継のMS5611-01BA03が搭載されています。
ボッシュのBMP085は、数ヶ月前のトランジスタ技術にデジキーの人気商品で1位になってました。
MultiWiiのファームウェアでプログラムでのフィルタなんかで対応できないのでしょうかね。
BMP085とMS5611-01BA01をMultiWiiConfのグラフで見てみると、MS5611-01BA01の方が変動が少ないようです。
Re: Re: multiwiiconfigのPIDについて - feaza
2012/10/29 (Mon) 20:28:20
Hobby robot factoryさん
ドイツ語翻訳してみました!単語のみなら翻訳も凄く判りやすかったです!
翻訳も色々なページをやってみてますが、物凄く判りにくい日本語訳で
ラジコン用語に対応した翻訳エンジン何か無いのかなって思ってしまう今日この頃です(^-^;
Multiwii se v2.0のbaroセンサーは人気のあるセンサーなんですね~♪ファームとかで改善出来れば嬉しいのですが、ダメな時は外付けのセンサーとか付けれないのかなって思ってますが、どうなのでしょう?gpsでgohomeをやりたい時はbaroセンサーも必須と思いますので(;゜∀゜)
Re: multiwiiconfigのPIDについて - HobbyRobotFactory URL
2012/10/30 (Tue) 17:06:07
BMP085は結構多くの数、使用されていると思うので、搭載する機器に対してのノウハウも結構あるのではないかと思います。
MultiWiiの次期バージョンで処理が修正されているかもです。
MultiWii開発中では、本日、ALT-HOLDのところが修正されているようです。
Re: multiwiiconfigのPIDについて - yanamori
2013/05/25 (Sat) 22:38:00
初めまして、hobbyRobotさんのペ-ジずうと見て勉強させて頂いております。今、HK Multiwii SE v2 、ESC H-KING 35A,モータ-930KV,フレ-ム480㎜、ペラ10×4.5、QUADXタイプ、RX Walkera 8ch,にてマルチコプタ-に挑戦しております。Multiwii 2.1の時は、HKコントロ-ラが入っておらず、悩んでおりましたが、たまたまMultiwii 2.2 にアップされ、 HobbyRobotさんの制作されているペ-ジどうり、セッテングしました。
最初、ペラは10×4.7の柔らかい物を使用して、PIDは、エルロン、エレベ-を2.0、ラダ-5.0位にしないと安定せず、それでもまだ斜め方向に揺れ、ペラが柔らかいせいかと、10×4.5の固い物に交換しましたが、今度は浮上と同時に左前方にひっくり返ります、ESCのキャリブレ-ショウンも一個づつ行っております。困っております、どこに原因有りますでしょうか、お願いいたします。
Re: multiwiiconfigのPIDについて - HobbyRobotFactory URL
2013/05/26 (Sun) 04:55:07
yanamoriさん
はじめまして。
今、クアッドコプターを組み替えているのでちょっとテストできないのですが、この掲示板に書き込みされている方で2.2を使用している方もいると思うので、似たような現象になった方はいませんでしょうか?
Re: multiwiiconfigのPIDについて - 紫峰
2013/05/26 (Sun) 09:24:55
yanamoriさん はじめまして。
プロペラを取替てから浮上と同時に左前方にひっくり返ります
プロペラの取付けピッチの逆とかはありませんか。
ESCのキャリブレ-ショウンも一個づつ行っております
HobbyRobotFactoryさんのラジコン関連に
ESCキャリブレーション
マルチコプターでは、受信機からの信号をコントローラーで処理し、各モーターへの信号を生成しています。
このため、ESCキャリブレーションは、コントローラーからの信号でキャリブレーションする必要があります。
Re: multiwiiconfigのPIDについて - ドローン
2016/01/03 (Sun) 22:55:25
参考にさせて頂きます。
ありがとうございました。
オークションへのリンクを少し修正しました。 - HobbyRobotFactory
2015/10/04 (Sun) 13:47:28
この掲示板の上にある、「ヤフオク!」のリンクですが、クリックすると新たに開くように修正しました。
あと、オークション用にIDを新たにしたので、評価数はまだ少ないです。
現時点で出品しているのは、TS832関係です。
海外製の5.8GHz送信機ですが、そのまま日本で使用すると電波法違反になります。
この送信機を日本で合法に使用するためには、アマチュア無線で使用できるように改造し、アマチュア無線として免許の交付を受ける必要があります。
無改造の送信機では、アマチュア無線帯以外の周波数も設定できてしまう為、TS832の場合は、CHを設定後にスイッチを取り外すかスイッチを操作できないように物理的にカバーするなどしないと免許が下りませんが、私のほうで色々と解析、プログラム開発し、CPUを交換することで日本のアマチュア無線で使用できる7chのみ選択できるようにしています。
オークションの出品は、改造済みのものと、改造サービスと言うことで、申請のサポートを含んだ形で出品しています。
NAZA M V2 - non
2015/09/10 (Thu) 22:04:29
HobbyRobotFactoryさん
こんにちわ
いろいろ無理なお願いして申し訳在りまっせん
NAZA M V2は廃棄します。
有難うございました。
NAZA M V2 - non
2015/09/10 (Thu) 09:47:44
HobbyRobotFactoryさん
こんにちわ
連絡 有難うございます。
NAZA-M アシスタントソフトウェア v2.40を使用したいます。
GPSはNAZA M LiteでテストでGPS/コンパスは正常に動いています。
CPUは正常に動いてい様です。
X1のエラーが出ています。
GPS noererga 出ています.
BasicのRCは設定できプロポで操作できます。
GainはPitch,Roll,Yawは設定できますがVerticalhah
は設定できません。
Advancedの設定はMotor,GimballはOKですが他はNGです。Voltagemo表示されません
以上
修理が困難でしょうか?
挑戦してくれませんか?
NAZAM V2 - non
2015/09/09 (Wed) 09:53:35
HobbyRobotFactoryさん
はじめまして
こんにちわ
先日 インターネットでNAZAM V2を購入しました。
商品のコメント(GPSが接続ができず修理できる方は入札して下さいとなっていました)を見ず落札してしまいました。
GPSが接続できず X1のエラーでます。
メーカーは購入伝票をなくしてしまい対応してくれません。
初期不良だそうで。す
捨てようかと思ったいますがもしかして、、
HobbyRobotFactoryさん調べていただくことは可能でしょうか?
Re: NAZAM V2 - HobbyRobotFactory
2015/09/10 (Thu) 02:37:11
nonさん
NAZA M V2は所有していないのですが、どの様な状況なのでしょうか?
コントローラーとしては動作しているのかな?
私が所有しているのはNAZA M Liteで、あとNetでの情報からだと修理できるかは分かりません。
どこがどの様に壊れているかで変わりますね。
NAZAのGPSが入っている丸いケースには、コンパス(MAG)センサーも入っており、GPSの信号とMAGセンサーの信号をCPU処理しています。
このGPS/コンパスは、直接NAZAに接続されています。
例えば、GPSは反応しないがコンパスは動作するのであれば、GPSモジュールか信号変換のCPUでGPSとの通信部分のみ破損が考えられます。
GPS、コンパス共に駄目なら、信号変換のCPUが壊れている、NAZAまでの配線が断線している、NAZAのGPS接続部分が壊れている。
GPS/コンパス、NAZAで、CPUが壊れている場合は、メーカー対応以外に修理する方法はありません。
(CPU単体で秋月などの通販で購入できたとしても、書き込むプログラムは公開されていない)
NAZA側が壊れている場合、内部は2段重ねの基板になっているので、修理が困難。
なので、丸いGPS/コンパスからNAZAまでの配線に断線が無いかくらいしか調べられないかと思います。
FPV ドローンレース - HobbyRobotFactory
2015/09/08 (Tue) 19:07:00
FPV ドローンレースDrone Impact Challenge 2015が開催されます。
http://www.drone.jp/news/20150908114505.html
私も裏では少し絡んでいるのですが、今回が第1回になるので、腕利きのかたは、参加してみてはいかがでしょうか。
モニターが壊れた(>_<) - クッキー
2015/08/17 (Mon) 08:34:47
 HobbyRobotFactoryさん
HobbyRobotFactoryさん
オジャマします(*^_^*)
先日ダイバモニターが突然映らなくなり
ゆすってみると中でコロコロと変な音がします。
開けてみるとコンデンサーがポロリ
基板コネクターがポロリ
原因は両面で止められた基板が暑さ?でずれたためでしょうか。
コンデンサーはまだしもコネクターの半田付けはとても無理そう
もし可能であれば一度HobbyRobotFactoryさん見ていただくことは可能でしょうか?
お手間な時で結構です。よろしくお願いします。
Re: モニターが壊れた(>_<) - HobbyRobotFactory
2015/08/17 (Mon) 09:32:13
クッキーさん
こんにちは。
写真だと、コネクタのほうは、ただ剥がれただけ、コンデンサーのほうは、パターンも少し剥離しているみたいですが、大丈夫と思います。
メールください。
Re: モニターが壊れた(>_<) - HobbyRobotFactory
2015/08/17 (Mon) 10:25:49
メール届きました。返信しましたのでよろしくです。
Re: モニターが壊れた(>_<) - クッキー
2015/08/18 (Tue) 13:40:33
HobbyRobotFactoryさん
お手数おかけしますが修理できそうでしたら
よろしくお願いします。
Re: モニターが壊れた(>_<) - HobbyRobotFactory
2015/08/23 (Sun) 18:11:03
修理完了したもの、もう届いたかな。
たぶん、大丈夫と思います。
あと、ついでの基板は、動作は問題ないと思いますので、設定など試してみてください。
aoさんとかに直接設定してもらうと良いかもです。
Re: モニターが壊れた(>_<) - クッキー
2015/08/24 (Mon) 18:56:37
HobbyRobotFactoryさん
昨日届きまして、早速映るかテストしてみました。
バッチリです!!
こころなしか、以前より良く写っている様な感じです。
もう違うの買っちゃおうかと諦めていたんですけど
これでまた、楽しめます。ヽ(・∀・)ノ
ありがとうございました。
ジンバル基盤、ちなみにソフトはあれ以外(aoさんおすすめの)を入れても動作するのでしょうか?
どーもあのソフト難しくて。
Re: モニターが壊れた(>_<) - HobbyRobotFactory
2015/08/24 (Mon) 20:19:39
クッキーさん
>こころなしか、以前より良く写っている様な感じです。
たぶん、気のせいかも。一度、ケースに入れた後、ちょっと配線の取り回しが気になったので、再度開けて配線を出来るだけ基板の上を通らないようにはしました。
ジンバルの方は、長い間使ってなかったので忘れてるな。
Martinez版の基板は、4、5枚持ってますが、全部同じファームにしてます。
オープンソースでは、これしかなかったと思います。
MultiWii のバージョンが2.4に上がってます。 - AGAWA
2015/04/27 (Mon) 15:05:28
2.4にアップしました。 当方 Multiwii Pro を使っています。 moriyana59さんの言うとおり、当初スロットルが異常でしたが、EEPROM.cpp の中の lookupThrottleRC のデータを定義をしている手前で conf.minthrottle = MINTHROTTLE; とconf.minthrottle を定義してあげる事で修正されました。
Re: MultiWii のバージョンが2.4に上がってます。 - HobbyRobotFactory URL
2015/04/27 (Mon) 21:09:46
AGAWAさん
情報、ありがとうございます。
私のほうは、あれこれと色々やっている最中で、まだ2.4の設定までたどり着いていません。
Re: MultiWii のバージョンが2.4に上がってます。 - moriyana59
2015/04/30 (Thu) 09:14:20
AGAWAさん、アドバイスいろいろ考えてみました
Lookup throttleRCの行の前に、conf.minthrottle=MINTHROTTLE;の行の定義を書き加える事でないでしょうか?
早速やってみました、Wii GUI で見てみると、ARMでMINTHROTTLE が1150になりました。うまくいったようです、有り難うございました。
飛行してみました、普通に飛行出来てますOKです。
Re: MultiWii のバージョンが2.4に上がってます。 - moriyana59
2015/05/03 (Sun) 20:13:21
ARMがMINTHROTTLE 1150 で上手く出来ましたがRTHにLAND を加えてみましたが、15mの高度になり対面にて戻って来ました、AUX SWを入れRTHにした時の方向に向き直り、上空でホバリングしています、一向にLANDする気配がありませんでした(Ver2.3と同じ)まだ、LANDを単体で試してませんが、RTH、LANDの組み合わせ方法が解りませんでしょうか?